|
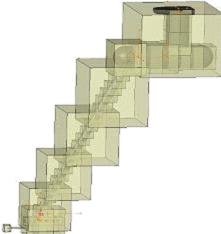
The PanRoll170 probe manipulator with an arm, is shown as an example.
Distance calculations are always carried out for the big boxes.
If the distance between one of the big boxes and a building part or other object is critical, calculations are also carried out for the small boxes inside the big box.
Depending on the distance, the traverse speed is reduced or the traverse is stopped.
Calculations are part of the PLC programs controlling the traverse, which run in a real-time environment.
|
|