|
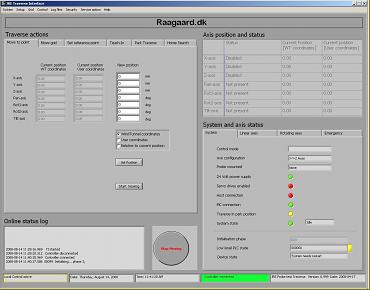
The operator can monitor and control the traverse from a Windows based PC that connects to the control system through and Ethernet connection. This is the local control mode.
He can move the traverse to a specified point or by creating a grid and move the traverse through that grid.
Target positions are specified in coordinates relative to the system zero point or a user defined reference point. Moving can be in absolute or relative coordinates.
Continuously the operator can monitor the system status like position, speed, servo drive state, emergency status and various messages from the system.
For a traverse that contains a Handbox it is possible to generate a grid by Teach-in. This is done by moving the traverse along a wanted contour with the Handbox and in a number of points press a button which will save the position. Based on the saved positions a grid can be generated and used for measurements.
The traverse can be controlled in local mode as described. It can also be controlled from the Handbox (option) which can be useful for measurements in critical positions or for teach-in.
Finally it can be controlled from a remote computer (host control mode) through an Ethernet connection. In this case the host computer has the full control until released for local control mode.
|
|